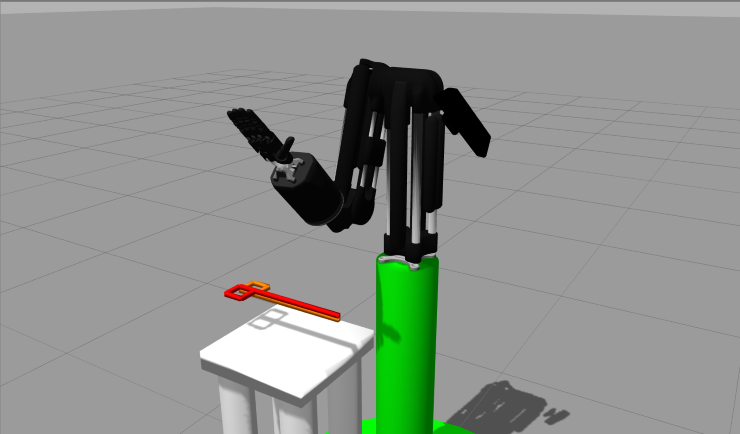
Task Simulator (Gazebo + ROS)
We can evaluate a task success degree of a certain synergy in this simulator.
We can evaluate a task success degree of a certain synergy in this simulator.

We try to reveal how do living things acquire the synergy by reinforcement learning.
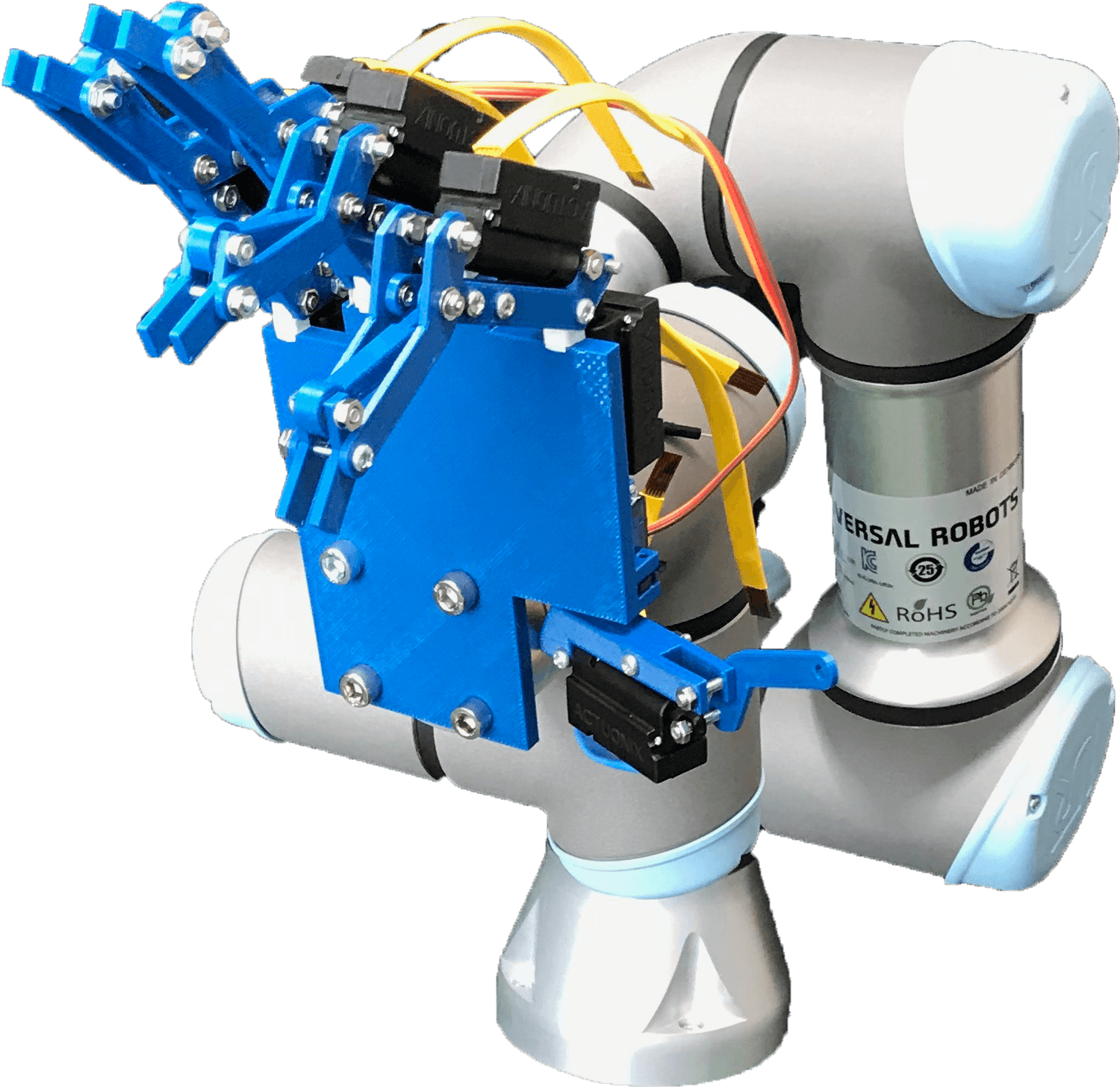
We try to design a novel humanoid hand which can perform various tasks by using our proposed synergies.

We can evaluate a task success rate of a synergy by using this system.
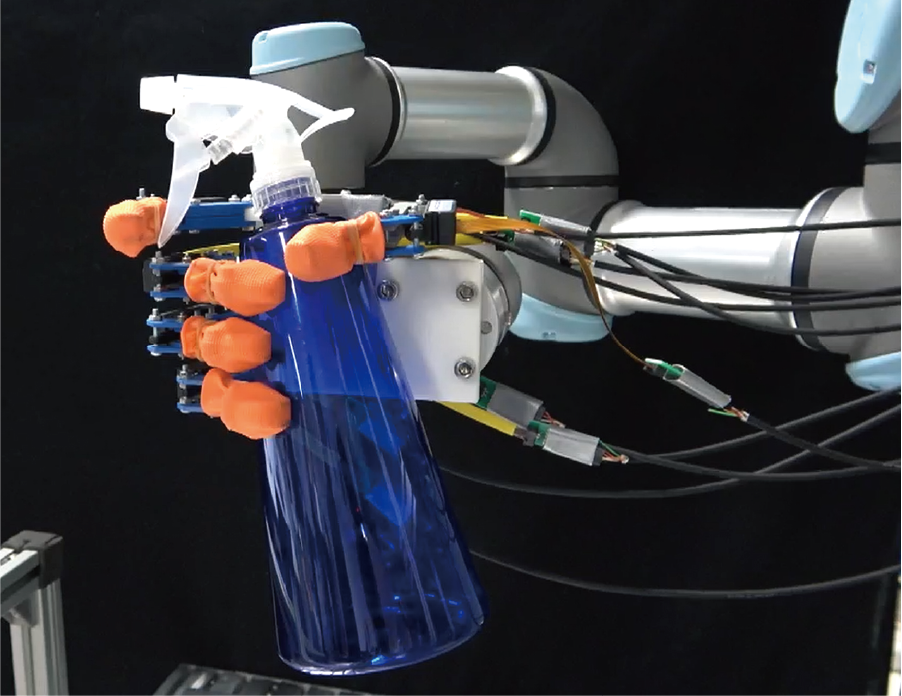
By using Functionally Divided Software Synergy, a multi-fingered hand can manipulate tools. [See Video]
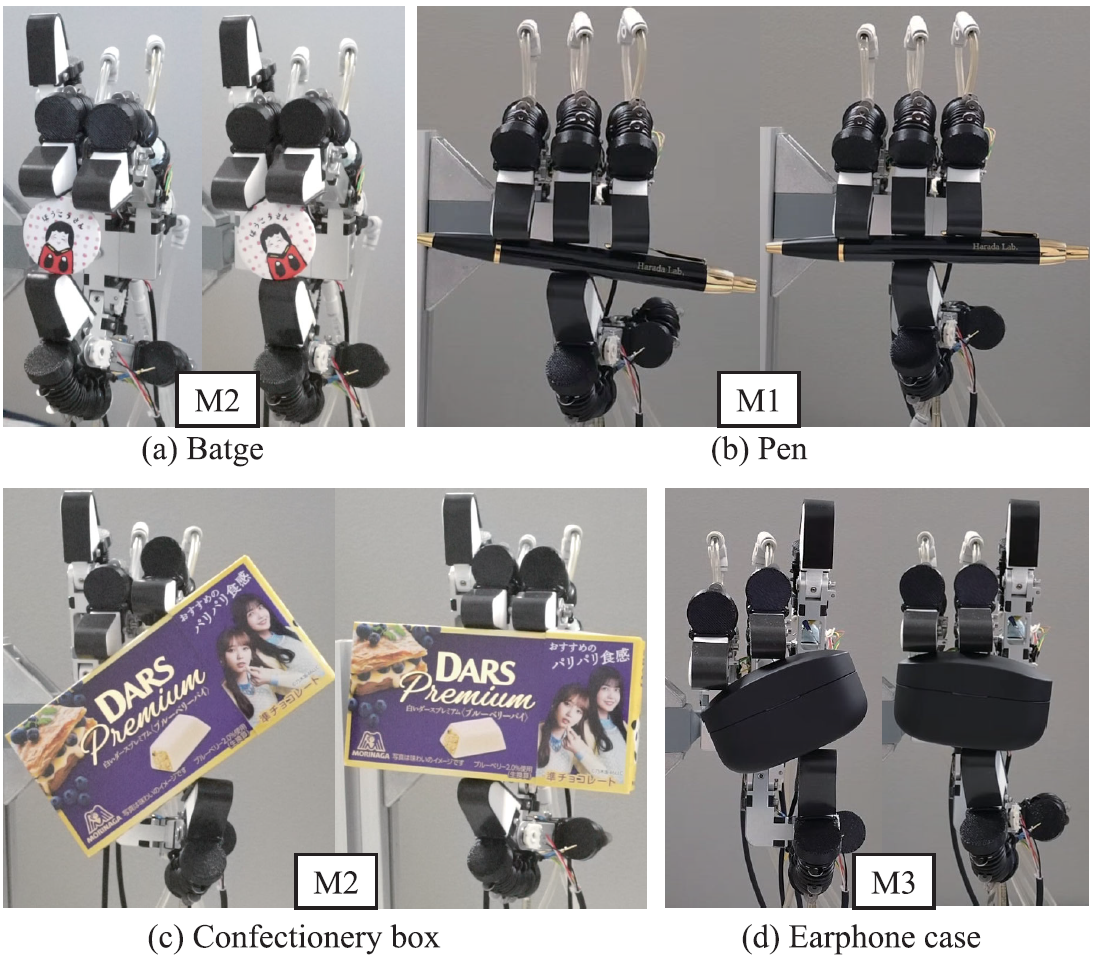
The fluid network connecting the actuators and pumps gives the multi-fingered hand dexterity while maintaining low-dimensional control. [See paper]